Fa'atomuaga
Talu mai le faaiuga o le vaitau o le 1960 ma le amataga o le vaitau o le 1970, o le tele o faiga masani o le pueina o ata mai le ea ua suia i faiga o le eletise-optika ma le eletise e maua mai le ea ma le ea. E ui o le pueina o ata mai le ea masani e aoga tele i le galu o le malamalama vaaia, ae o faiga faaonaponei o le pueina o ata mai le ea ma le eleele e maua ai faamatalaga faafuainumera e aofia ai le malamalama vaaia, infrared atagia, infrared vevela, ma vaega o le microwave spectral. O auala masani o le faamatalaina o ata vaaia i le pueina o ata mai le ea e aoga pea. Ae ui i lea, o le pueina o ata mai le ea e aofia ai le tele o galuega, e aofia ai gaoioiga faaopoopo e pei o le faataitaiga o meatotino o sini, fuaina o le spectral o mea faitino, ma le auiliiliga o ata faafuainumera mo le mauaina o faamatalaga.
O le lagona mamao, lea e faasino i vaega uma o metotia e iloa ai mea mamao e le fesootaʻi, o se metotia e faʻaaogaina ai le eletise e iloa ai, faamaumau ma fuaina ai uiga o se sini ma o le faauigaga na muamua fautuaina i le 1950. O le matata o le lagona mamao ma le faafanua, e vaevaeina i ni auala se lua e iloa ai: lagona galue ma lagona le gaoioi, lea e galue ai le lagona Lidar, e mafai ona faʻaaoga lona lava malosi e faʻasalalau atu ai le malamalama i le sini ma iloa ai le malamalama o loʻo atagia mai ai.
Lagona ma le Fa'aogaina o le Lidar Malosi
O le Lidar (iloilo ma le fa'alauteleina o le malamalama) o se tekinolosi e fuaina ai le mamao e fa'atatau i le taimi e fa'asalalauina ma maua ai fa'ailoilo laser. O nisi taimi e fa'aoga fa'atasi ai le Airborne LiDAR ma le airborne laser scanning, mapping, po'o le LiDAR.
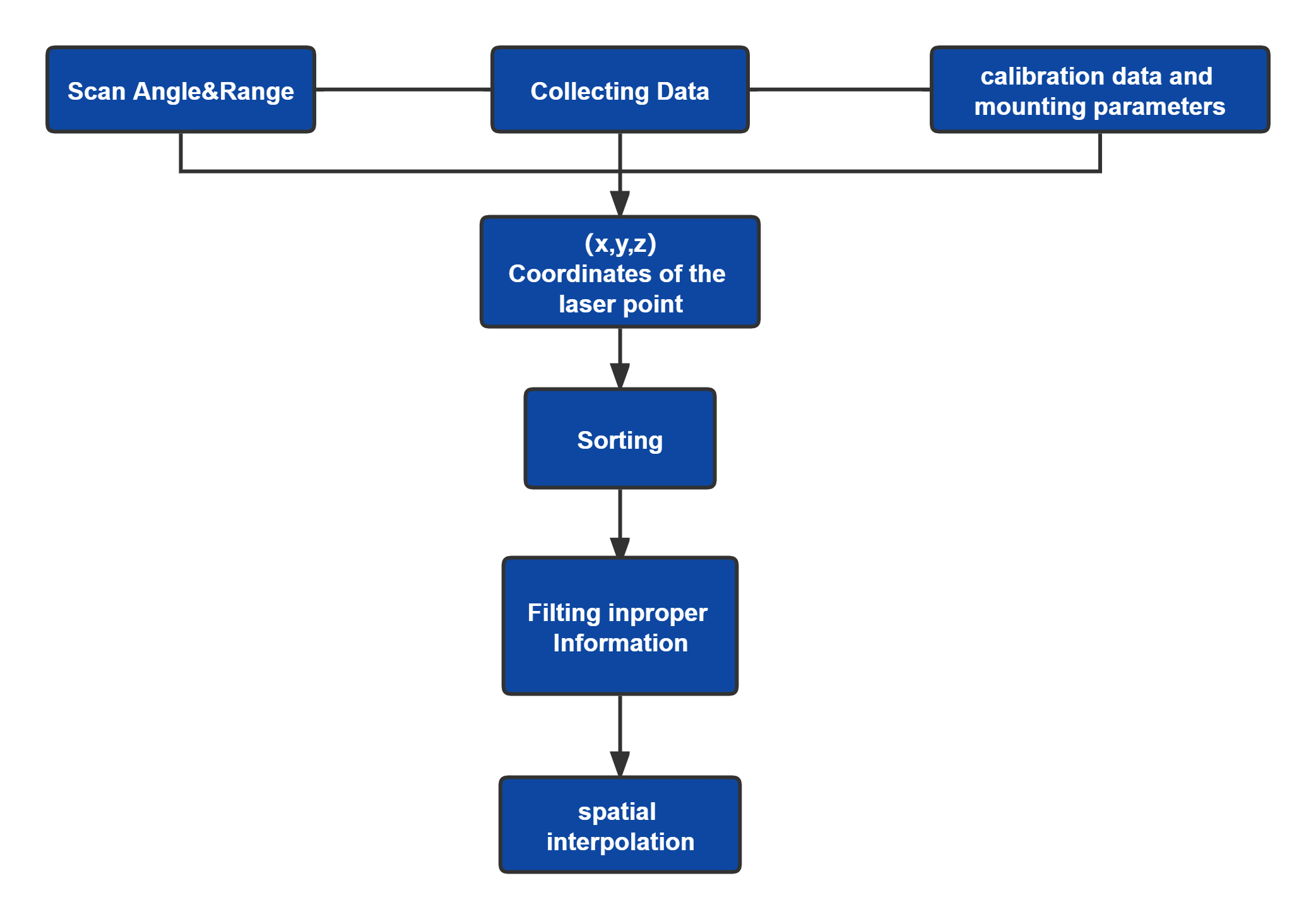
O se siata masani lea e faʻaalia ai laʻasaga autū o le faʻagasologaina o faʻamatalaga o vaega i le taimi o le faʻaaogaina o le LiDAR. A maeʻa ona aoina faʻamaopoopoga (x, y, z), o le faʻavasegaina o nei vaega e mafai ona faʻaleleia atili ai le lelei o le faʻaalia ma le faʻagasologaina o faʻamatalaga. I le faʻaopoopoga i le faʻagasologa faʻataʻatitia o vaega LiDAR, e aoga foʻi faʻamatalaga o le malosi mai le tali mai a le LiDAR.
I fa'aoga uma o le fa'alogo mamao ma le fa'afanua, o le LiDAR e iai le tulaga lelei o le mauaina o fua sa'o e tuto'atasi mai le susulu o le la ma isi aafiaga o le tau. O se faiga masani o le fa'alogo mamao e aofia ai vaega e lua, o se masini su'esu'e mamao ma se masini su'esu'e mo le tu'uina o tulaga, lea e mafai ona fuaina sa'o le siosiomaga fa'afanua i le 3D e aunoa ma le fa'aletonu o le geometric aua e leai se ata e aofia ai (o le lalolagi 3D o lo'o fa'aalia i le 2D plane).
O NISI O A MATOU PUNAOA O LIDAR
Filifiliga o Punaoa o le LiDAR Laser e Saogalemu mo Mata mo le Sensor


